Euclidean space

Every point in three-dimensional Euclidean space is determined by three coordinates.
In geometry, Euclidean space encompasses the two-dimensional Euclidean plane, the three-dimensional space of Euclidean geometry, and similar spaces of higher dimension. It is named after the Ancient Greek mathematician Euclid of Alexandria.[1] The term "Euclidean" distinguishes these spaces from other types of spaces considered in modern geometry. Euclidean spaces also generalize to higher dimensions.
Classical Greek geometry defined the Euclidean plane and Euclidean three-dimensional space using certain postulates, while the other properties of these spaces were deduced as theorems. Geometric constructions were also used to define rational numbers as ratios of commensurable lengths. When algebra and mathematical analysis became developed enough, this relation reversed and now it is more common to define Euclidean spaces from vector spaces, which allows using Cartesian coordinates and the power of algebra and calculus. This means that points are specified with tuples of real numbers, called coordinate vectors, and geometric shapes are defined by equations and inequalities relating these coordinates. This approach has also the advantage of allowing easily the generalization of geometry to Euclidean spaces of more than three dimensions.
From the modern viewpoint, there is essentially only one Euclidean space of each dimension. While Euclidean space is defined by a set of axioms, these axioms do not specify how the points are to be represented.[2] Euclidean space can, as one possible choice of representation, be modeled using Cartesian coordinates. In this case, the Euclidean space is then modeled by the real coordinate space (Rn) of the same dimension. In one dimension, this is the real line; in two dimensions, it is the Cartesian plane; and in higher dimensions it is a coordinate space with three or more real number coordinates. Mathematicians denote the n-dimensional Euclidean space by En if they wish to emphasize its Euclidean nature, but Rn is used as well since the latter is assumed to have the standard Euclidean structure, and these two structures are not always distinguished. Euclidean spaces have finite dimension.[3]
Contents
1 Definition
1.1 History
1.2 Intuitive overview
1.3 Technical definition
2 Euclidean structure
2.1 Distance
2.2 Angle
2.3 Rotations and reflections
2.4 Euclidean group
3 Non-Cartesian coordinates
4 Geometric shapes
4.1 Lines, planes, and other subspaces
4.2 Line segments and triangles
4.3 Polytopes and root systems
4.4 Curves
4.5 Balls, spheres, and hypersurfaces
5 Topology
6 Applications
7 Alternatives and generalizations
7.1 Curved spaces
7.2 Indefinite quadratic form
7.3 Other number fields
7.4 Infinite dimensions
8 See also
9 Footnotes
10 References
11 External links
Definition
History
Euclidean space were introduced by ancient Greeks as an abstraction of our physical space. Their great innovation, appearing in Euclid's Elements was to build and prove all geometry by starting from a few very basic properties, which are abstracted from the physical world, and are too basic for being mathematically proved. These properties are called postulates, or axioms in modern language. This way of defining Euclidean space is still in use under the name of synthetic geometry.
In 1637, René Descartes introduced Cartesian coordinates and showed that this allows reducing geometric problem to algebraic computations with numbers. This reduction of geometry to algebra was a major change of point of view, as, until then, the real numbers—that is, rational numbers and non-rational numbers together–were defined in terms of geometry, as lengths and distance.
Despite the wide use of Descartes approaches, which was called analytic geometry, the definition of Euclidean space remained unchanged until the end of 19th century. The introduction of abstract vector spaces allowed to use them for defining Euclidean spaces, with a purely algebraic definition. This new definition has been shown to be equivalent to the classical definition in terms of geometrical axioms. Now, this is this algebraic definition that is more often used for introducing Euclidean spaces.
Intuitive overview
One way to think of the Euclidean plane is as a set of points satisfying certain relationships, expressible in terms of distance and angle. For example, there are two fundamental operations (referred to as motions) on the plane. One is translation, which means a shifting of the plane so that every point is shifted in the same direction and by the same distance. The other is rotation about a fixed point in the plane, in which every point in the plane turns about that fixed point through the same angle. One of the basic tenets of Euclidean geometry is that two figures (usually considered as subsets) of the plane should be considered equivalent (congruent) if one can be transformed into the other by some sequence of translations, rotations and reflections (see below).
In order to make all of this mathematically precise, the theory must clearly define the notions of distance, angle, translation, and rotation for a mathematically described space. Even when used in physical theories, Euclidean space is an abstraction detached from actual physical locations, specific reference frames, measurement instruments, and so on. A purely mathematical definition of Euclidean space also ignores questions of units of length and other physical dimensions: the distance in a "mathematical" space is a number, not something expressed in inches or metres. The standard way to define such space, as carried out in the remainder of this article, is to define the Euclidean plane as a two-dimensional real vector space equipped with an inner product.[3] The reason for working with arbitrary vector spaces instead of Rn is that it is often preferable to work in a coordinate-free manner (that is, without choosing a preferred basis). For then:
- the vectors in the vector space correspond to the points of the Euclidean plane,
- the addition operation in the vector space corresponds to translation, and
- the inner product implies notions of angle and distance, which can be used to define rotation.
Once the Euclidean plane has been described in this language, it is actually a simple matter to extend its concept to arbitrary dimensions. For the most part, the vocabulary, formulae, and calculations are not made any more difficult by the presence of more dimensions. (However, rotations are more subtle in high dimensions, and visualizing high-dimensional spaces remains difficult, even for experienced mathematicians.)
A Euclidean space is not technically a vector space but rather an affine space, on which a vector space acts by translations, or, conversely, a Euclidean vector is the difference (displacement) in an ordered pair of points, not a single point. Intuitively, the distinction says merely that there is no canonical choice of where the origin should go in the space, because it can be translated anywhere. When a certain point is chosen, it can be declared the origin and subsequent calculations may ignore the difference between a point and its coordinate vector, as said above. See point–vector distinction for details.
Technical definition
Euclidean structure
These are distances between points and the angles between lines or vectors, which satisfy certain conditions (see below), which makes a set of points a Euclidean space. The natural way to obtain these quantities is by introducing and using the standard inner product (also known as the dot product) on Rn.[3] The inner product of any two real n-vectors x and y is defined by
- x⋅y=∑i=1nxiyi=x1y1+x2y2+⋯+xnyn,displaystyle mathbf x cdot mathbf y =sum _i=1^nx_iy_i=x_1y_1+x_2y_2+cdots +x_ny_n,

where xi and yi are ith coordinates of vectors x and y respectively.
The result is always a real number.
Distance
The inner product of x with itself is always non-negative. This product allows us to define the "length" of a vector x through square root:
- ‖x‖=x⋅x=∑i=1nxi2.mathbf x

This length function satisfies the required properties of a norm and is called the Euclidean norm on Rn.
Finally, one can use the norm to define a metric (or distance function) on Rn by
- d(x,y)=‖x−y‖=∑i=1n(xi−yi)2.=sqrt sum _i=1^n(x_i-y_i)^2.

This distance function is called the Euclidean metric. This formula expresses a special case of the Pythagorean theorem.
This distance function (which makes a metric space) is sufficient to define all Euclidean geometry, including the dot product. Thus, a real coordinate space together with this Euclidean structure is called Euclidean space. Its vectors form an inner product space (in fact a Hilbert space), and a normed vector space.
The metric space structure is the main reason behind the use of real numbers R, not some other ordered field, as the mathematical foundation of Euclidean (and many other) spaces. Euclidean space is a complete metric space, a property which is impossible to achieve operating over rational numbers, for example.
Angle
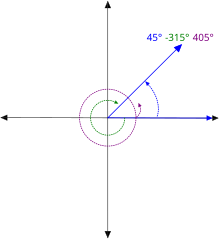
Positive and negative angles on the oriented plane
The (non-reflex) angle θ (0° ≤ θ ≤ 180°) between vectors x and y is then given by
- θ=arccos(x⋅y‖x‖‖y‖)displaystyle theta =arccos left(frac mathbf x cdot mathbf y right)

where arccos is the arccosine function. It is useful only for n > 1,[footnote 1] and the case n = 2 is somewhat special. Namely, on an oriented Euclidean plane one can define an angle between two vectors as a number defined modulo 1 turn (usually denoted as either 2π or 360°), such that ∠y x = −∠x y. This oriented angle is equal either to the angle θ from the formula above or to −θ. If one non-zero vector is fixed (such as the first basis vector), then each non-zero vector is uniquely defined by its magnitude and angle.
The angle does not change if vectors x and y are multiplied by positive numbers.
Unlike the aforementioned situation with distance, the scale of angles is the same in pure mathematics, physics, and computing. It does not depend on the scale of distances; all distances may be multiplied by some fixed factor, and all angles will be preserved. Usually, the angle is considered a dimensionless quantity, but there are different units of measurement, such as radian (preferred in pure mathematics and theoretical physics) and degree (°) (preferred in most applications).
Rotations and reflections
Symmetries of a Euclidean space are transformations which preserve the Euclidean metric (called isometries). Although aforementioned translations are most obvious of them, they have the same structure for any affine space and do not show a distinctive character of Euclidean geometry. Another family of symmetries leave one point fixed, which may be seen as the origin without loss of generality. All transformations, which preserves the origin and the Euclidean metric, are linear maps. Such transformations Q must, for any x and y, satisfy:
Qx⋅Qy=x⋅ydisplaystyle Qmathbf x cdot Qmathbf y =mathbf x cdot mathbf y(explain the notation),
- |Qx|=|x|.mathbf x

Such transforms constitute a group called the orthogonal group O(n). Its elements Q are exactly solutions of a matrix equation
- QTQ=QQT=I,displaystyle Q^mathsf TQ=QQ^mathsf T=I,

where QT is the transpose of Q and I is the identity matrix.
But a Euclidean space is orientable.[footnote 2] Each of these transformations either preserves or reverses orientation depending on whether its determinant is +1 or −1 respectively. Only transformations which preserve orientation, which form the special orthogonal group SO(n), are considered (proper) rotations. This group has, as a Lie group, the same dimension n(n − 1) /2 and is the identity component of O(n).
| Group | Diffeo- morphic to | Isomorphic to |
|---|---|---|
SO(1) | 1 | |
| SO(2) | S1 | U(1) |
| SO(3) | RP3 | SU(2) / ±1 |
| SO(4) | (S3 × S3) / ±1 | (SU(2) × SU(2)) / ±1 |
| Note: elements of SU(2) are also known as versors. | ||
Groups SO(n) are well-studied for n ≤ 4. There are no non-trivial rotations in 0- and 1-spaces. Rotations of a Euclidean plane (n = 2) are parametrized by the angle (modulo 1 turn). Rotations of a 3-space are parametrized with axis and angle, whereas a rotation of a 4-space is a superposition of two 2-dimensional rotations around perpendicular planes.
Among linear transforms in O(n) which reverse the orientation are hyperplane reflections. This is the only possible case for n ≤ 2, but starting from three dimensions, such isometry in the general position is a rotoreflection.
Euclidean group
The Euclidean group E(n), also referred to as the group of all isometries ISO(n), treats translations, rotations, and reflections in a uniform way, considering them as group actions in the context of group theory, and especially in Lie group theory. These group actions preserve the Euclidean structure.
As the group of all isometries, ISO(n), the Euclidean group is important because it makes Euclidean geometry a case of Klein geometry, a theoretical framework including many alternative geometries.
The structure of Euclidean spaces – distances, lines, vectors, angles (up to sign), and so on – is invariant under the transformations of their associated Euclidean group. For instance, translations form a commutative subgroup that acts freely and transitively on En, while the stabilizer of any point there is the aforementioned O(n).
Along with translations, rotations, reflections, as well as the identity transformation, Euclidean motions comprise also glide reflections (for n ≥ 2), screw operations and rotoreflections (for n ≥ 3), and even more complex combinations of primitive transformations for n ≥ 4.
The group structure determines which conditions a metric space needs to satisfy to be a Euclidean space:
- Firstly, a metric space must be translationally invariant with respect to some (finite-dimensional) real vector space. This means that the space itself is an affine space, that the space is flat, not curved, and points do not have different properties, and so any point can be translated to any other point.
- Secondly, the metric must correspond in the aforementioned way to some positive-defined quadratic form on this vector space, because point stabilizers have to be isomorphic to O(n).
Non-Cartesian coordinates

3-dimensional skew coordinates
Cartesian coordinates are arguably the standard, but not the only possible option for a Euclidean space.
Affine coordinates and barycentric coordinates are compatible with the affine structure of En, but make formulae for angles and distances more complicated.
Another approach, which goes in line with ideas of differential geometry and conformal geometry, is orthogonal coordinates, where coordinate hypersurfaces of different coordinates are orthogonal, although curved. Examples include the polar coordinate system on Euclidean plane, the second important plane coordinate system.
See below about expression of the Euclidean structure in curvilinear coordinates.
Geometric shapes

Parabolic coordinates
Barycentric coordinates in 3-dimensional space: four coordinates are related with one linear equation
| Polar coordi- nates: see Angle above |  |
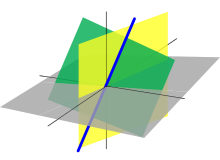
Three mutually transversal planes in the 3-dimensional space and their intersections, three lines
Lines, planes, and other subspaces
The simplest (after points) objects in Euclidean space are flats, or Euclidean subspaces of lesser dimension. Points are 0-dimensional flats, 1-dimensional flats are called (straight) lines, and 2-dimensional flats are planes. (n − 1)-dimensional flats are called hyperplanes.
Any two distinct points lie on exactly one line. Any line and a point outside it lie on exactly one plane. More generally, the properties of flats and their incidence of Euclidean space are shared with affine geometry, whereas the affine geometry is devoid of distances and angles.
Line segments and triangles
 The sum of angles of a triangle is an important problem, which exerted a great influence to 19th-century mathematics. In a Euclidean space it invariably equals to 180°, or a half-turn |
This is not only a line which a pair (A, B) of distinct points defines. Points on the line which lie between A and B, together with A and B themselves, constitute a line segment A B. Any line segment has the length, which equals to distance between A and B. If A = B, then the segment is degenerate and its length equals to 0, otherwise the length is positive.
A (non-degenerate) triangle is defined by three points not lying on the same line. Any triangle lies on one plane. The concept of triangle is not specific to Euclidean spaces, but Euclidean triangles have numerous special properties and define many derived objects.
A triangle can be thought of as a 3-gon on a plane, a special (and the first meaningful in Euclidean geometry) case of a polygon.
Polytopes and root systems
| The Platonic solids are the five polyhedra that are most regular in a combinatoric sense, but also, their symmetry groups are embedded into O(3) | ||
 Pair of dual tetrahedra |  Cube and octahedron | 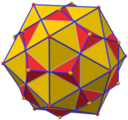 Dodecahedron and icosahedron |
Polytope is a concept that generalizes polygons on a plane and polyhedra in 3-dimensional space (which are among the earliest studied geometrical objects). A simplex is a generalization of a line segment (1-simplex) and a triangle (2-simplex). A tetrahedron is a 3-simplex.
The concept of a polytope belongs to affine geometry, which is more general than Euclidean. But Euclidean geometry distinguish regular polytopes. For example, affine geometry does not see the difference between an equilateral triangle and a right triangle, but in Euclidean space the former is regular and the latter is not.
Root systems are special sets of Euclidean vectors. A root system is often identical to the set of vertices of a regular polytope.
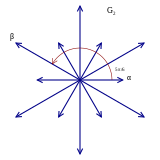 The root system G2 |  An orthogonal projection of the 231 polytope, whose vertices are elements of the E7 root system |
Curves
Balls, spheres, and hypersurfaces
Topology
Since Euclidean space is a metric space, it is also a topological space with the natural topology induced by the metric. The metric topology on En is called the Euclidean topology, and it is identical to the standard topology on Rn. A set is open if and only if it contains an open ball around each of its points; in other words, open balls form a base of the topology. The topological dimension of the Euclidean n-space equals n, which implies that spaces of different dimension are not homeomorphic. A finer result is the invariance of domain, which proves that any subset of n-space, that is (with its subspace topology) homeomorphic to an open subset of n-space, is itself open.
Applications
Aside from countless uses in fundamental mathematics, a Euclidean model of the physical space can be used to solve many practical problems with sufficient precision. Two usual approaches are a fixed, or stationary reference frame (i.e. the description of a motion of objects as their positions that change continuously with time), and the use of Galilean space-time symmetry (such as in Newtonian mechanics). To both of them the modern Euclidean geometry provides a convenient formalism; for example, the space of Galilean velocities is itself a Euclidean space (see relative velocity for details).
Topographical maps and technical drawings are planar Euclidean. An idea behind them is the scale invariance of Euclidean geometry, that permits to represent large objects in a small sheet of paper, or a screen.
Alternatives and generalizations
Although Euclidean spaces are no longer considered to be the only possible setting for a geometry, they act as prototypes for other geometric objects. Ideas and terminology from Euclidean geometry (both traditional and analytic) are pervasive in modern mathematics, where other geometric objects share many similarities with Euclidean spaces, share part of their structure, or embed Euclidean spaces.
Curved spaces
A smooth manifold is a Hausdorff topological space that is locally diffeomorphic to Euclidean space. Diffeomorphism does not respect distance and angle, but if one additionally prescribes a smoothly varying inner product on the manifold's tangent spaces, then the result is what is called a Riemannian manifold. Put differently, a Riemannian manifold is a space constructed by deforming and patching together Euclidean spaces. Such a space enjoys notions of distance and angle, but they behave in a curved, non-Euclidean manner. The simplest Riemannian manifold, consisting of Rn with a constant inner product, is essentially identical to Euclidean n-space itself. Less trivial examples are n-sphere and hyperbolic spaces. Discovery of the latter in the 19th century was branded as the non-Euclidean geometry.
Also, the concept of a Riemannian manifold permits an expression of the Euclidean structure in any smooth coordinate system, via metric tensor. From this tensor one can compute the Riemann curvature tensor. Where the latter equals to zero, the metric structure is locally Euclidean (it means that at least some open set in the coordinate space is isometric to a piece of Euclidean space), no matter whether coordinates are affine or curvilinear.
Indefinite quadratic form
If one replaces the inner product of a Euclidean space with an indefinite quadratic form, the result is a pseudo-Euclidean space. Smooth manifolds built from such spaces are called pseudo-Riemannian manifolds. Perhaps their most famous application is the theory of relativity, where flat spacetime is a pseudo-Euclidean space called Minkowski space, where rotations correspond to motions of hyperbolic spaces mentioned above. Further generalization to curved spacetimes form pseudo-Riemannian manifolds, such as in general relativity.
Other number fields
Another line of generalization is to consider other number fields than one of real numbers. Over complex numbers, a Hilbert space can be seen as a generalization of Euclidean dot product structure, although the definition of the inner product becomes a sesquilinear form for compatibility with metric structure.
Infinite dimensions
See also
Function of several real variables, a coordinate presentation of a function on a Euclidean space
Geometric algebra, an alternative algebraic formalism- High-dimensional space
Real coordinate space, a frequently used representation of Euclidean space
Vector calculus, a standard algebraic formalism- Vector space
Footnotes
^ On the real line (n = 1) any two non-zero vectors are either parallel or antiparallel depending on whether their signs match or oppose. There are no angles between 0 and 180°.
^ It is Rn which is oriented because of the ordering of elements of the standard basis. Although an orientation is not an attribute of the Euclidean structure, there are only two possible orientations, and any linear automorphism either keeps orientation or reverses (swaps the two).
References
^ Ball, W.W. Rouse (1960) [1908]. A Short Account of the History of Mathematics (4th ed.). Dover Publications. pp. 50–62. ISBN 0-486-20630-0..mw-parser-output cite.citationfont-style:inherit.mw-parser-output qquotes:"""""""'""'".mw-parser-output code.cs1-codecolor:inherit;background:inherit;border:inherit;padding:inherit.mw-parser-output .cs1-lock-free abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/6/65/Lock-green.svg/9px-Lock-green.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .cs1-lock-limited a,.mw-parser-output .cs1-lock-registration abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/d/d6/Lock-gray-alt-2.svg/9px-Lock-gray-alt-2.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .cs1-lock-subscription abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/a/aa/Lock-red-alt-2.svg/9px-Lock-red-alt-2.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registrationcolor:#555.mw-parser-output .cs1-subscription span,.mw-parser-output .cs1-registration spanborder-bottom:1px dotted;cursor:help.mw-parser-output .cs1-hidden-errordisplay:none;font-size:100%.mw-parser-output .cs1-visible-errorfont-size:100%.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration,.mw-parser-output .cs1-formatfont-size:95%.mw-parser-output .cs1-kern-left,.mw-parser-output .cs1-kern-wl-leftpadding-left:0.2em.mw-parser-output .cs1-kern-right,.mw-parser-output .cs1-kern-wl-rightpadding-right:0.2em
^ Gabi, Aalex. "What is the difference between Euclidean and Cartesian spaces?". Mathematics Stack Exchange. Mathematics Stack Exchange.
^ abc E.D. Solomentsev (7 February 2011). "Euclidean space". Encyclopedia of Mathematics. Springer. Retrieved 1 May 2014.
External links
Hazewinkel, Michiel, ed. (2001) [1994], "Euclidean space", Encyclopedia of Mathematics, Springer Science+Business Media B.V. / Kluwer Academic Publishers, ISBN 978-1-55608-010-4
Authority control |
|
|---|


